Luvun 2 mukaisesti kuitulujitetut kerrokset ovat ortotrooppisia tai tasoisotrooppisia. Lineaariselastisen ortotrooppisen kerroksen mekaanisen käyttäytymisen määrittelevät täysin sen kimmoarvot pääkoordinaatistossa (kuva 8.4). Kimmoarvoja on kaikkiaan yhdeksän:
- kimmomodulit E1, E2 ja E3, jotka ilmaisevat veto- ja puristusjäykkyyden aksiaalisessa kuormituksessa pääsuunnissa 1, 2 ja 3
- Poissonin vakiot νij ; ij = 12, 13 ja 23, jotka kuvaavat paljonko rakenne supistuu tai laajenee suunnassa j, kun veto- tai puristuskuorma vaikuttaa suunnassa i, sekä
- liukumodulit G12, G13 ja G23, jotka ilmaisevat leikkausjäykkyyden, kun leikkauskuorma vaikuttaa tasoissa 12, 13 tai 23.

Kuva 8.4 Ortotrooppinen lujitemuovikerros ja sen päätasot 12, 13 ja 23.
Luvun 2 mukaisesti otrotrooppisia kerroksia ja niistä muodostettuja laminaatteja voidaan useimmiten tarkastella olettaen tasoa vastaan kohtisuorat jännitykset häviävän pieniksi. Kerrostasossa lineaariselastisen, ortotrooppisen kerroksen käyttäytyminen voidaan kuvata viidellä kimmoarvolla: jäykkyyksillä pääsuunnissa (E1 ja E2), leikkausjäykkyydellä vastaten leikkauskuormitusta päätasossa (G12) sekä Poissonin vakioilla (n12 ja n21). Viidestä kimmoarvosta vain neljä on riippumatonta, sillä jäykkyyksien ja Poissonin vakioiden välille on johdettavissa yhteys

(8.12)
Kappaleen 8.1 mukaisesti kimmoarvoille saadaan arviot laskennallisesti, kun aineosien ominaisuudet ja komposiitin rakenne tunnetaan. Tarkemmat arvot määritetään tarvittaessa kokeellisesti.
8.2.1 Jännitysvenymärelaatiot kerroskoordinaatistossa
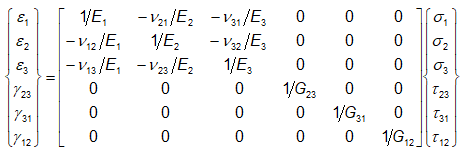
Kun lineaariselastista, ortotrooppista kerrosta tarkastellaan sen pääkoordinaatistossa, tasojännitysten kerrokseen aiheuttamat tasovenymät saadaan kimmoarvojen määrittelyjen mukaisesti lausekkeesta (kuva 8.5):

(8.13)

Kuva 8.5 Ortotrooppisen kerroksen tasokuormitus pääkoordinaatistossa
Yhtälöryhmä on ns. yleistetty Hooken laki tasojännitystilassa olevalle kerrokselle. Kerros- ja laminaattianalyyseissä relaatiot esitetään tavallisesti matriisimuodossa:

(8.14)
Kerroinmatriisia kutsutaan kerroksen joustomatriisiksi. Joustomatriisi on symmetrinen, mistä seuraa kimmomodulien ja Poissonin vakioiden välinen yhteys (8.12). Joustomatriisin yleinen muoto on näin:

(8.15)
Termien alaindeksointi perustuu luvussa 2 esitettyyn jännitys- ja venymävektorien määrittelyyn, jonka mukaisesti tasoleikkausjännitys ja tasoliukuma ovat vektorien viimeiset eli kuudennet komponentit.
Lauseke (8.14) esitetään usein lyhyesti muodossa

(8.16)
Ratkaisemalla yhtälöryhmästä (8.13) jännityskomponentit, saadaan käänteiset yhteydet:

(8.17)
Nämäkin esitetään tavallisesti matriisimuodossa:

(8.18)
tai lyhyemmin:

(8.19)
Kerroinmatriisia [Q] kutsutaan kerroksen jäykkyysmatriisiksi. Jäykkyysmatriisin todetaan joustomatriisin tapaan olevan symmetrinen.
Isotrooppisen kerroksen jousto- ja jäykkyysmatriisit saadaan lausekkeiden (8.14) ja (8.18) erikoistapauksina:

(8.20)
Lausekkeiden (8.20) mukaiset jousto- ja jäykkyysmatriisit kuvaavat myös tasoisotrooppisen kerroksen käyttäytymisen, kun kerrostaso on isotropiataso.
Lauseke (8.14) on myös helposti laajennettavissa 3D-jännitystilaa vastaavaksi:
(8.21)
Ratkaisemalla jännitykset venymien funktiona saadaan käänteinen yhteys, joka on muotoa:

(8.22)
Sekä tasojännitystilaa että 3D-jännitystilaa vastaavien jousto- ja jäykkyysmatriisien lävistäjäalkioiden tulee olla positiivisia. Ehdoista saadaan kimmoarvoille seuraavat rajoitukset:

(8.23)
Esimerkki
Esimerkkeinä
tasoisotrooppisen ja ortotrooppisen kerroksen mekaanisesta käyttäytymisestä tarkastellaan
kahta lujitettua kerrosta: lasikuitumatolla lujitettua polyesteriä sekä
yhdensuuntaisella lasikuitukudoksella lujitettua epoksia. Kerrosten tyypilliset
kimmoarvot ja näistä johdetut jousto- ja jäykkyysmatriisit on esitetty taulukossa
8.1. Kerrosten lujitepitoisuudet vastaavat käsinlaminoinnilla saavutettavia
arvoja.
Taulukko 8.1 Tyypilliset kimmoarvot sekä jousto- ja jäykkyysmatriisit E-lasikuitu/polyesteri-mattokerrokselle sekä E-lasikuitu/epoksi-yhdensuuntaiskerrokselle.

8.2.2 Jännitysvenymärelaatiot laminaattikoordinaatistossa
Tarkoituksenmukaisten jäykkyys- ja lujuusominaisuuksien saavuttamiseksi laminaatit joudutaan yleensä muodostamaan vaihtelevasti suunnatuista ortotrooppisista kerroksista. Laminaatin suunnittelussa ja mitoituksessa on tällöin tunnettava kerrosten käyttäytyminen mielivaltaisesti tasossaan kuormitettuna. Käyttäytyminen voidaan kuvata edellä esitetyillä kimmoarvoilla, sillä jännitykset ja venymät voidaan muuntaa yksinkertaisin muunnoskaavoin yhdestä suorakulmaisesta koordinaatistosta toiseen.
Luvun 2 määrittelyjä vastaten globaalin laminaattikoordinaatiston xyz ja kerroksen pääkoordinaatiston 123 välinen kulma q on positiivinen kuvan 8.6 mukaisesti. Globaalin ja lokaalin koordinaatiston jännityksille saadaan muunnoskaavat kuvan mukaisten kolmioelementtien voimatasapainoehdoista. Voimat paksuusyksikköä kohti saadaan kertomalla jännitykset sen sivun pituudella, johon jännitys vaikuttaa. Ottamalla lisäksi huomioon voimien vaikutussuunnat, saadaan kuvan tapauksessa voimatasapainoehdoiksi 1- ja 2-akselien suunnassa
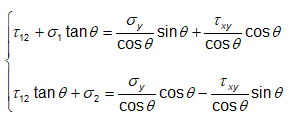
(8.24)
Vastaavasti voidaan kirjoittaa voimatasapainoehdot kolmioelementille, jonka hypotenuusa on y-akselin suuntainen. Ratkaisemalla yhtälöistä kerroksen pääkoordinaatiston jännitykset saadaan:

(8.25)

Kuva 8.6 Kerroksen lokaalin 12-koordinaatiston ja globaalin xy-koordinaatiston välinen positiivinen kulma, kerroksen kolmioelementti ja siihen vaikuttavat jännitykset.
Yhtälöryhmä (8.25) esitetään tavallisesti matriisimuodossa

(8.26)
missä matriisi [T] on ns. koordinaatiston muunnosmatriisi:

(8.27)
Venymien muunnoskaavat voidaan lausekkeen (8.27) mukaista muunnosmatriisia käyttäen esittää muodossa

(8.28)
missä liukuma-arvojen jako kahdella johtuu siitä, että liukuma on määritelty kuvan 2.13 mukaisena teknisenä liukumana. Jakajat voidaan sisällyttää muunnosmatriisiin, jolloin lauseke (8.28) muuntuu muotoon

(8.29)
missä [T]-T on muunnosmatriisin [T] transpoosin käänteismatriisi:

(8.30)
Matriisiyhtälöistä (8.26) ja (8.29) saadaan lausuttua xy-koordinaatiston jännitys- ja venymäkomponentit 12-koordinaatiston komponenttien avulla:

(8.31 a,b)
Kaavassa (8.31) esiintyvä [T]:n käänteismatriisi [T]-1 on

(8.32)
Lausekkeista (8.31a), (8.19) ja (8.29) saadaan lopulta jännitysten ja venymien väliseksi yhteydeksi xy-koordinaatistossa

(8.33)
Lausekkeen (8.33) mukainen 3×3 matriisi

(8.34)
on kerroksen jäykkyysmatriisi globaalissa xy-koordinaatistossa. Tämäkin jäykkyysmatriisi on symmetrinen. Sen alkioille saadaan matriisitulosta (8.34) lausekkeet:

(8.35)
Kun matriisiyhtälö (8.33) kerrotaan puolittain jäykkyysmatriisin käänteismatriisilla, saadaan määrättyä jännitystilaa vastaavaksi venymätilaksi

(8.36)
missä jännitysvektorin kerroinmatriisi on kerroksen joustomatriisi globaalissa xy-koordinaatistossa. Joustomatriisi on jäykkyysmatriisin tapaan symmetrinen. Sen alkioiden lausekkeet ovat:

(8.37)
8.2.3 Kerroksen mekaaninen käyttäytyminen laminaattikoordinaatistossa
Kaavojen (8.35) ja (8.37) mukaisesti kerroksen xy-koordinaatiston jäykkyys- ja joustomatriiseilla on yksi merkittävä ero verrattuna kerroksen pääkoordinaatiston jäykkyys- ja joustomatriiseihin. Tämä ero on jäykkyys- ja joustomatriisien täyttyminen, kun 0° < q < 90°.
Matriisien nollasta poikkeavien 16- ja 26-alkioiden johdosta kerroksen vaste kuormitukseen on globaalissa koordinaatistossa erilainen kuin pääkoordinaatistossa. Lausekkeesta (8.36) voidaan todeta, että kerrokseen kohdistettu normaalijännitys sx tai sy aiheuttaa tällöin kerrokseen normaalivenymien ohella liukuman eli leikkausmuodonmuutoksen. Toisaalta kerrokseen kohdistettu leikkausjännitys txy aiheuttaa liukuman ohella normaalivenymiä. Tätä ilmiöitä havainnollistaa kuva 8.7. Ilmiötä kutsutaan normaali- ja leikkauskuormitustilanteiden kytkeytymiseksi ja matriisien 16- ja 26-alkioita kerroksen tasokäyttäytymisen kytkentätermeiksi.

Kuva 8.7 Normaali- ja leikkausjännityksen aiheuttamat muodonmuutokset, kun kerrosta kuormitetaan globaalissa xy-koordinaatistossa.
Jäykkyys- ja joustomatriisit määrittelevät täysin kerroksen käyttäytymisen xy-koordinaatistossa. Käyttäytyminen voidaan kuvata myös kimmoarvoilla, jotka saadaan kerroksen joustomatriisien alkioista tarkastelemalla kuormitustilanteita, joissa vain yksi kuormituskomponentti on nollasta poikkeava. Kimmomodulit Ex ja Ey, liukumoduli Gxy sekä Poissonin vakiot nxy ja nyx eivät kuitenkaan enää riitä täysin kuvaamaan kerroskäyttäytymistä. Näiden rinnalle tarvitaan lisätermit, jotka kuvaavat normaalijännityksen aiheuttaman liukuman ja leikkausjännityksen aiheuttamien normaalivenymien suunnan ja suuruuden. Näitä lisätermejä kutsutaan Lekhnitskiin vakioiksi. Kaikki kimmoarvot voidaan määrittää joustomatriisin alkioista:

(8.38)
Kaavoissa Lekhnitskiin vakiot h on indeksoitu yleisimmän käytännön mukaisesti osoittamalla alaindeksin ensimmäisellä osalla vaikuttava kuormituskomponentti ja toisella osalla muodonmuutos, jonka suuruuden vakio ilmaisee. Muodonmuutos on suhteutettu primääriin muodonmuutokseen. Näin esimerkiksi hx,xy kuvaa normaalijännityksen sx aiheuttaman liukuman gxy suhteutettuna jännityksen aiheuttamaan primääriin venymään ex:

(8.39)
Esimerkki
Esimerkkinä edellä esitettyjen kaavojen käytöstä tarkastellaan taulukon 8.1 mukaista lasikuitu/epoksi-yhdensuuntaiskerrosta xy-koordinaatistossa, joka muodostaa kulman +45° kerroskoordinaatiston 12 kanssa.
Taulukossa 8.1 kerroksen jäykkyysmatriisiksi kerroskoordinaatistossa saatiin

Kaava (8.32) antaa koordinaatiston muunnosmatriisiksi:

Kerroksen jäykkyysmatriisi xy-koordinaatistossa voidaan edelleen laskea kaavasta (8.34) tai kaavoilla (8.35):

Joustomatriisi saadaan kääntämällä jäykkyysmatriisi:
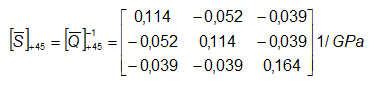
Jäykkyys- ja joustomatriisien kaikkien alkioiden nähdään olevan nollasta poikkeavia. Kerroksen käyttäytyminen xy-koordinaatiston aksiaali- ja leikkauskuormituksessa on näin ollen kuvan 8.7 mukaista. Kaavoista (8.38) saadaan kerroksen kimmoarvoiksi:

Tuloksen mukaisesti kerroksen jäykkyys x-koordinaatin suunnassa on vain noin 30 % kuitusuunnan jäykkyydestä. Liukumoduli taas on likimain kaksinkertainen verrattuna kerroskoordinaatiston liukumoduliin. Poissonin vakio ja Lekhnitskiin vakiot ovat melko suuria osoittaen, että aksiaali- tai leikkauskuormitettuun kerrokseen syntyy primäärin venymän tai liukuman ohella merkittävästi myös muita muodonmuutoksia.
8.2.4 Jäykkyysinvariantit
Jäykkyysmatriisin alkioiden lausekkeet (8.35) voidaan edelleen muokata erottamalla toisistaan kerroksen suuntakulmasta riippuvat ja riippumattomat osat. Toimituksen tuloksena alkioille saadaan seuraavat lausekkeet:

(8.40)
missä U1 – U5 ovat niin kutsutut jäykkyysinvariantit, joiden lausekkeet ovat

(8.41)